Beschreibung
Feature:
1. ERKENNUNG DER MOTORDREHZAHL: Der Treiber erfasst die Drehzahl des Motors, indem er das Impulsausgangssignal oder die elektromotorische Rückkraft (nicht induktiv) des eingebauten Hall-Sensors im Motor erfasst
2. MOTOR CLOSED LOOP CONTROL (STABILE DREHZAHL): Im Hall-Modus wird das Hall-Signal verwendet, um die Drehzahl zu erkennen, und der PID-Einstellalgorithmus wird für die Regelung des geschlossenen Regelkreises verwendet. Im Hall-freien Modus wird die elektromotorische Rückkraft zur Erkennung der Drehzahl verwendet, und der PID-Anpassungsalgorithmus wird für die Regelung im geschlossenen Regelkreis verwendet.
3. MOTOR OPEN LOOP CONTROL: Verwenden Sie im Hall-Modus das Hall-Signal, um die Drehzahl zu erkennen und eine Open-Loop-Regelung durchzuführen (PWM mit konstantem Ausgang). Im Hall-freien Modus wird die elektromotorische Rückkraft verwendet, um die Drehzahl zu erfassen und eine Regelung im offenen Regelkreis durchzuführen (PWM mit konstantem Ausgangsantrieb).
4. BESCHLEUNIGUNGS- UND VERZÖGERUNGSSTEUERUNG DES MOTORS: Während des Startens, Stoppens und Änderns der Betriebsdrehzahl des Motors wird die Drehzahl des Motors genau gemäß den Anforderungen des Benutzers an langsamen Start und langsamen Stopp gesteuert, wodurch ein reibungsloses Starten, Stoppen, Beschleunigen und Abbremsen des Motors erreicht wird, wodurch die Auswirkungen auf die mechanische Ausrüstung des Getriebes reduziert werden. und Vermeidung von übermäßigem Anlaufstrom.
5. MOTORBREMSSTEUERUNG: Im Hall-Modus wird die Rückwärtsbremsung (regeneratives Bremsen) verwendet, und der Fahrer kehrt die Bremsung schnell um, um eine Notbremswirkung zu erzielen. Im Hall-freien Modus wird die Bremsung mit Energieverbrauch übernommen, und der Fahrer regelt automatisch den Bremsstrom, um Schäden an Motor und Fahrer durch zu hohen Strom zu vermeiden.
6. MOTORKOMMUTIERUNGSSTEUERUNG: Der Prozess des Umschaltens zwischen Vorwärts- und Rückwärtsrichtung des Motors. Der Fahrer verzögert zunächst auf unter 10 U/min gemäß den eingestellten Beschleunigungs- und Verzögerungsanforderungen, bevor er die Richtung wechselt, um eine reibungslose und schnelle Kommutierung zu gewährleisten. Häufiges Pendeln führt nicht zu Schäden am Fahrer oder Motor.
7. MOTORÜBERLASTUNG UND SCHUTZ VOR BLOCKIERTEM ROTOR: Um die Leistung des Motors voll auszuschöpfen, lässt der Treiber eine gewisse Überlastung des Motors zu. Der Überlastschutzwert wird auf der Grundlage des eingestellten Nennstroms bestimmt und schützt den Motor effektiv.
8. INTERNE ENTSTÖRUNG: Um die Genauigkeit der Strommessung des Motorstromkreises zu gewährleisten, sind der Treiberkreis und der Steuerkreis durch Interferenzdämpfung und -verbrauch sowie transiente Interferenzunterdrückung gekoppelt, wodurch effektiv sichergestellt wird, dass der Steuerkreis nicht durch die Interferenz des Treiberkreises beeinträchtigt wird.
Spezifikation:
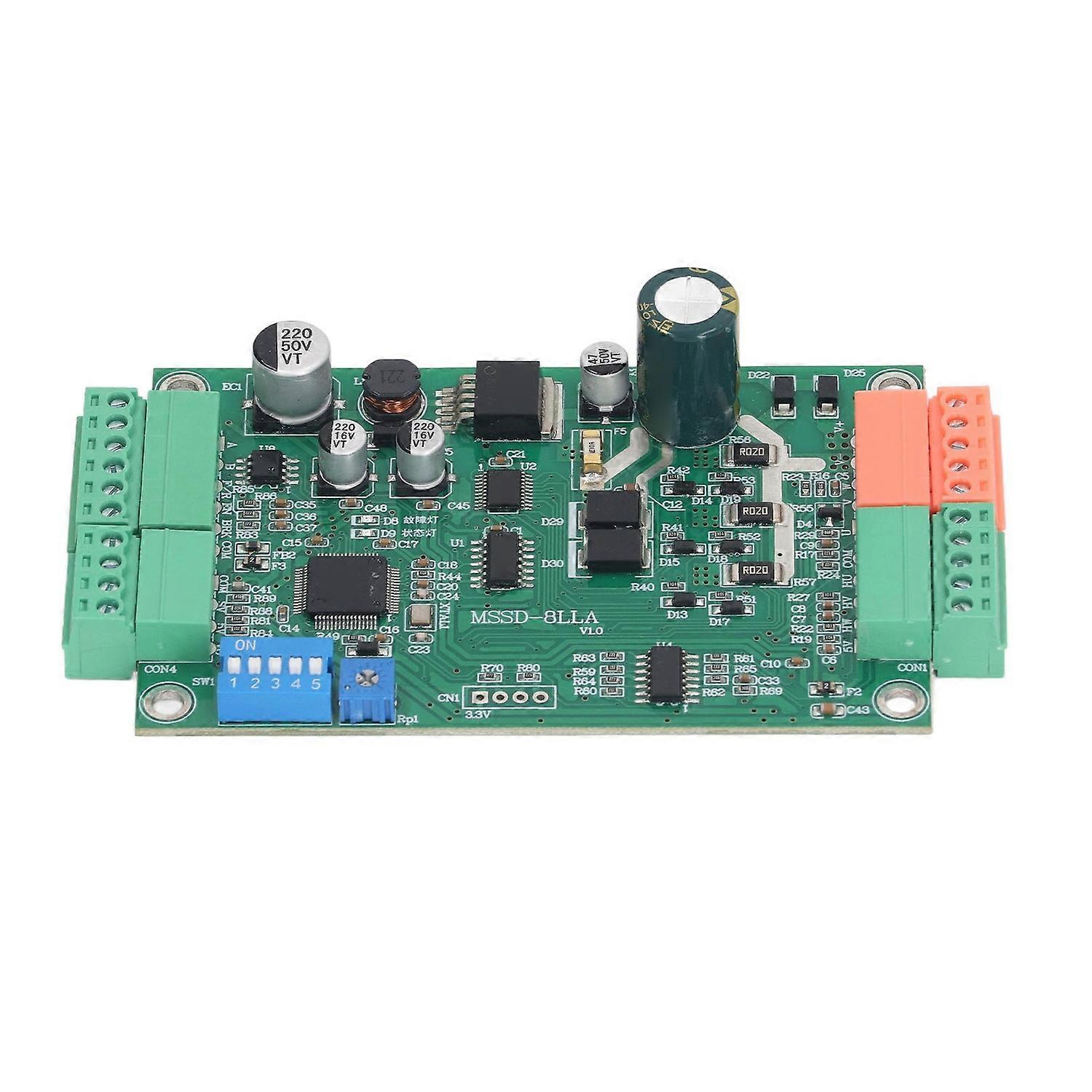
Artikeltyp: Brushless Motor Driver Board Controller
Modus: MSSD 8LLA
Material: PCB
Hauptfunktion: Offener Regelkreis, PID-Regler mit drei geschlossenen Drehzahlregelungen
Strom: 8A
Spannung: 9V-36V
Antriebsmodus: Rechteckwelle
Steuermodus: 485 Kommunikation, analoge Menge, PWM, Flugzeugmodell PWM, Joystick, internes, externes Potentiometer
Sensor: Keine, Hall
Prinzip Übersicht:
Dieser Treiber verwendet eine Rechteckwellensteuerung (auch bekannt als Trapezwellensteuerung oder 6-Stufen-Kommutierungssteuerung), die bürstenlose Motoren mit und ohne Hall-Sensoren antreiben und steuern können. Er kann Strom und Drehzahl genau erfassen, eine Drehzahlschleifen-PI-Regelung und eine Open-Loop-Regelung durchführen und eine Motorbeschleunigung, -verzögerung und eine stabile Drehzahlregelung erreichen. Unter ihnen verwendet die induktive Antriebssteuerung die Vier-Quadranten-Steuerungsmethode, die eine Bremskraft entgegen der Drehrichtung erzeugen kann und beim Bergabfahren oder Heben schwerer Gegenstände nicht abwürgt. Sinnloses Fahren verwendet eine Zwei-Quadranten-Steuerungsmethode.
Funktionsmerkmale:
Closed Loop Control:
1. Potentiometer (eingebaut oder extern), Analoge Drehzahlregelung: Stellen Sie das stabile Drehzahlziel des Motors durch Drehen des Potentiometers oder Einstellen der analogen Spannung ein.
2. PWM-Drehzahlregelung: Passen Sie das stabile Drehzahlziel des Motors über das PWM-Tastverhältnis an.
3. PWM-Geschwindigkeitsregelung für Flugzeugmodelle: Steuern Sie die stabile Drehzahl und Richtung des Motors über die PWM-Pulsweitenzeit des Flugzeugmodells.
4. Rocker Speed Control: Steuern Sie die stabile Drehzahl und Richtung des Motors über die Spannung des Joysticks.
5. 485 RTU-Kommunikation Geschwindigkeitsregelung: Durch das Senden von Geschwindigkeitszielen über die 485-Kommunikation stabilisiert sich der Fahrer automatisch auf der Zielgeschwindigkeit.
Open Loop Control:
1. Potentiometer (eingebaut oder extern), Analoge Steuerung: Passen Sie die PWM-Größe des Motorantriebs an, indem Sie das Potentiometer drehen oder die analoge Spannung einstellen.
2. PWM-Steuerung: Passen Sie die stabile PWM-Größe des Motors über das PWM-Tastverhältnis an.
3. PWM-Steuerung des Flugzeugmodells: Die PWM-Größe und die Richtung des Motors werden über die PWM-Pulsweitenzeit des Flugzeugmodells gesteuert.
4. Wippensteuerung: Steuern Sie die PWM-Größe und -Richtung des Motors über die Wippspannung.
5. 4
-
Fruugo-ID:
334840987-737579485
-
EAN:
7695727627017
Produktsicherheitsinformationen
Bitte beachten Sie die unten aufgeführten spezifischen Produktsicherheitsinformationen für dieses Produkt
Die folgenden Informationen werden vom unabhängigen Drittanbieter bereitgestellt, der dieses Produkt verkauft.
Produktsicherheitsetiketten

Sicherheitswarnungen:
Achtung: Bitte lesen Sie die Produktanleitung vor Gebrauch sorgfältig durch, um eine korrekte Anwendung sicherzustellen.
Seriennummer:
7695727627017
Lieferung und Rückgaben
Versand innerhalb von 2 Tagen
Versand von China.
Wir tun unser Bestes, um dafür zu sorgen, dass die von Ihnen bestellten Produkte vollständig und gemäß Ihrer Spezifikationen an Sie geliefert werden. Wenn Sie allerdings eine unvollständige Bestellung oder Artikel erhalten, die sich von den bestellten unterscheiden, oder es einen anderen Grund gibt, warum Sie mit Ihrer Bestellung nicht zufrieden sind, können Sie die gesamte Bestellung oder einzelne darin enthaltenen Produkte zurücksenden und eine vollständige Rückerstattung für die Artikel erhalten. Vollständige Rückgaberichtlinie ansehen